
Данная статья родилась в помыслах изготовить себе трёх-координатный микростанок с ЧПУ для выполнения некоторых минимальных задач по сверлению, фрезерованию и вырезке печатных плат.
В течение некоторого времени мне очень часто на запчасти отдают старые матричные и струйные принтеры по причинам того, что хозяева решили купить себе новый и более совершенный принтер или МФУ, ибо старенький свой принтер уже морально устарел или его ремонт будет стоить соизмеримо с приобретением нового принтера, а старый попросту выкинули.
После разборки и выброса ненужных пластмассовых деталей и внутренней механики, я себе оставлял только печатные платы, шаговые двигатели с пасиками и стальные направляющие, по которым когда-то бегала печатающая головка. Давным-давно я посматривал в них на интересную микросхему, которая питает тамошние шаговые двигатели.
Просто запросив в поиске даташит на данную микросхему, я увидел в ней не просто драйвер с четырьмя парами ключей, а полноценный микрошаговый ШИМ контроллер.
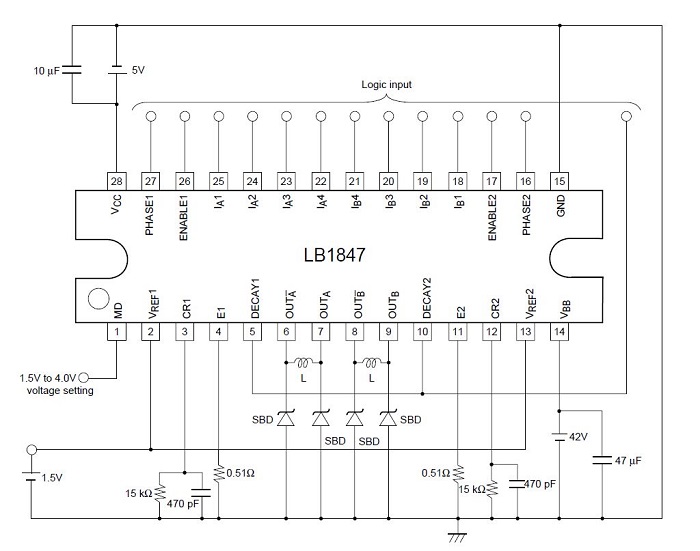
Итак, микросхема LB1847 (даташит PDF) — это драйвер для шаговых двигателей с широтно-импульсным управлением током обмоток биполярного двигателя.
Особенностью данной микросхемы является возможность установки тока на обмотки двигателя в 15 шагов в любой полуфазе.
С возможностью установки медленного затухания тока, быстрого спада тока или смешанного режима, тем самым повышая частотные характеристики, которыми можно добиться высокоточного управления и получить наименьшие вибрации двигателя.
Не буду заниматься комментированием оригинального даташита, вы просто можете запросить его в поиске, найти во вложении к статье и самостоятельно изучить характеристики. Я же двинусь далее.
Схема подключения довольно простая.
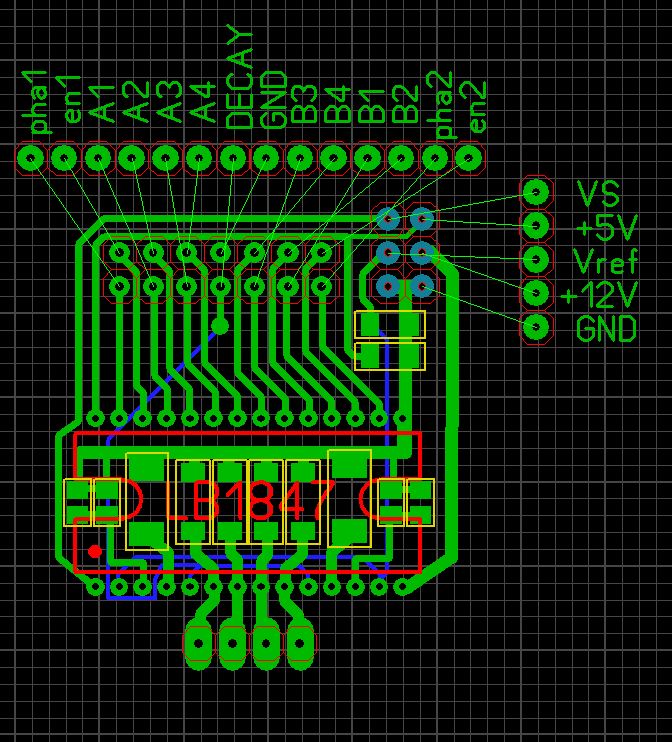
В считанные минуты была нарисована печатка и при помощи ЛУТа сделана плата, обвязку из резисторов, конденсаторов и диодов Шоттки, тоже снял со старой платы:
Далее это все было подключено к одной из моих самодельных тестовых плат с микроконтроллером Atmega32. Конечно, можно использовать любую доступную вам, но нужно учитывать, что должно хватать выводов для подключения, так как на управление используется аж 12 линий.
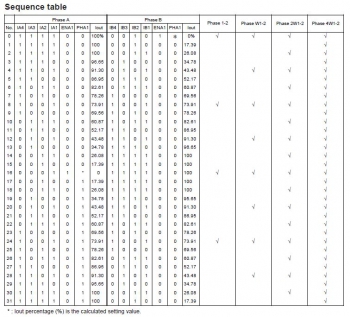
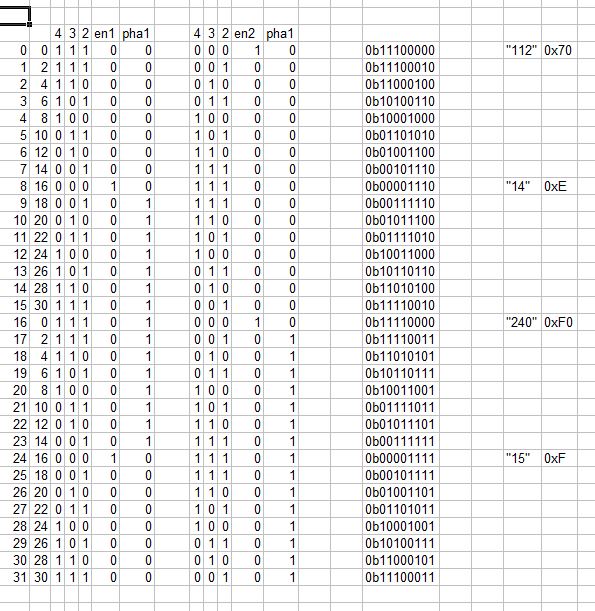
В моём случае изначально тестировался максимально возможный режим работы драйвера в режиме Phase 4W1-2, но потом посчитал что это уже чересчур и настолько уже сверх-точность мне не нужна, потому и перевел на режим Phase 2W1-2, тем самым просмотрев данную таблицу выявил закономерность по первым входам каждого плеча драйвера — на них постоянно присутствует логическая «1» в нужном для меня режиме.
Ну и пусть, просто подключим их на питание микросхемы и забудем про них.
Так мы сократили количество используемых выводов до 10. При дальнейшем исследовании этой таблицы явно заметно, что вывод ENABLE получая логическую «1» (просто обесточивает канал, давая возможность другому каналу притянуть к себе магнитный ротор на максимальном токе), и при этом не имеет значения в какой фазе этот канал находится.
Сразу заметно, что та самая единица появляется тогда как на входах 2-3-4 каждого канала присутствует логический «0». Тут просто вспомним о справочнике микросхем логики и найдем нужный для нас логический элемент. Нам понадобится два элемента 3ИЛИ-НЕ, выбираем микросхему, импортная 7427, отечественная К155ЛЕ4 или подобные.
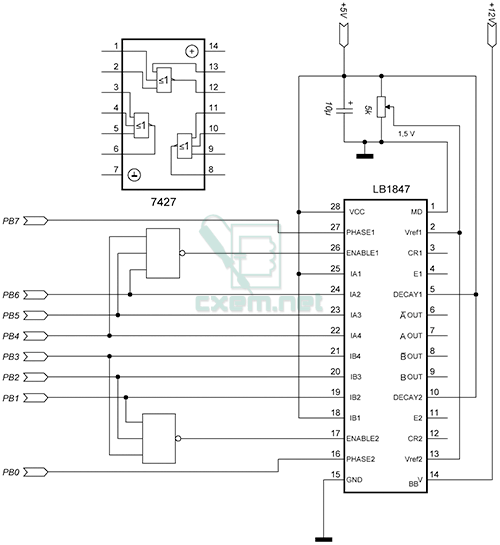
Обвязку полного подключения LB1847 не изображал, так как она ничем не отличается от той, что в даташите. На Vref временно поставил проволочный подстроечный резистор.
Как видно, теперь мы используем только 8 выводов для управления, чего вполне достаточно для использования одного полного порта микроконтроллера.
Теперь приступим к программированию нашего микроконтроллера. Для этого нам потребуется предварительно рассчитать значение выхода целого порта микроконтроллера для каждого микрошага.
Тут я просто использовал программу Excell, где создал таблицу и встроенными формулами рассчитал значение PORTB для режима Phase 2W1-2 (учтите, что пример в даташите указан только для одной фазы, необходимо продублировать его для второй с изменением направления тока через обмотки).
Сразу забегу вперед. Я изначально вдоволь наигрался как заданием статических величин по значениям перемещения вала, так и с вводом значения перемещения через порт RS232, но потом всё же захотелось вручную лицезреть сие детище и подключил энкодер, дабы насладиться механическим управлением с визуальным вращением вала шагового двигателя.
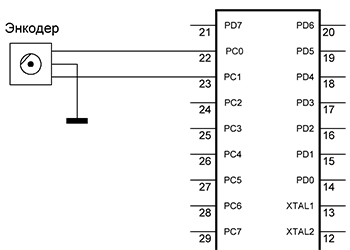
Микроконтроллер Atmega32, Кварц 16МГц, PORTB весь на выход, PC0 и PC1 на вход с подтяжкой к шине питания, настраиваем таймер на обработку прерывания каждые 10 микросекунд.
Функция опроса энкодера
Функция опроса энкодера не имеет никаких особенностей, банально читает значения с выводов и по их изменению добавляет или отнимает значение счетчика, тем самым диктуя главной программе направление на вращения. Единственное что опрос у меня сейчас проходит на частоте 100кГц, и мне было лень добавлять отдельный счетчик (три строчки программы), чтобы отсчитывать только полные щелчки оборота энкодера, да это и совсем не нужно на данной стадии тестовых испытаний.
Обработчик прерывания таймера
Аналогичная функция на обработку обратного счета для движения оси шагового двигателя в обратную сторону.
В данную функцию я ввел очень полезную величину, можно задать шаг работы двигателя от 1 до 8. Это я и хочу использовать в дальнейшем, чтобы можно было программно управлять скоростью перемещения.
Например: для холостого перемещения на пару тысяч шагов можно составить простой алгоритм, который может плавно начать с одного микрошага за такт разрешения таймера, и каждые 10 тактов поднимать на единицу пока не достигнет «8», так будет программно реализован четверть шаг (счетчик тоже будет добавлять или отнимать по 8 шагов), а далее за 100 шагов до окончания пути начать уменьшать значение перешагивания каждые 10 тактов и двигатель плавно остановится на нужном ему значении. Такая реализация программно обеспечит высокую скорость перемещения при максимальной точности перемещения вала двигателя даже под нагрузкой (старт-разгон-работа-торможение-остановка). Можно, конечно, поднять значение и до 16, в таком случае двигатель выйдет на режим полушага.
Главный цикл программы
Для проверок использовался один из биполярных шаговых двигателей с тех самых разобранных принтеров.

Он имеет шаг 7,5 градусов, что соответствует 48 шагам на полный оборот, при 32 микрошагах это выходит точность 1536 микрошагов на полный оборот вала двигателя. Если бы нам не было жалко использовать еще 2 вывода микроконтроллера, то легко можно получить 1/64 шага. А присмотревшись в конструктив этой микросхемы, думаю несложно и поболее 128 шагов сделать, только придется много расчетов произвести на усредненные значения, правда будет серьёзная нелинейность вращения, но и то что мы получили вполне достаточно, незачем нам вращение менее 0,1 градуса.
Энкодер, что я нашел у себя, имеет 24 щелчка на полный оборот, в каждом щелчке 4 импульса изменения состояния, то есть 96 импульсов на полный оборот.
Без использования энкодера программно запускал его на довольно быстрое вращение и действительно чувствовалась сила на валу при том, что я его питаю 12V вместо 24V родного питания принтера.
Вот посмотрите что из этого вышло.
При необходимости можно сохранять в энерго-независимой памяти текущие значения шага, и использовать его при отключениях устройства, только заранее привести значение к нулевому, ибо после отключения-включения устройства полушаг может провернуть вал как в одну, так и в другую сторону. Или просто использовать калибровку (например, на оптопаре или концевике) при включении устройства.
Данная статья была предварительным тестом работы микросхемы LB1847, все собрано практически на коленке, только для уточнения всех нюансов её работы. Далее планируется использовать более продвинутый микроконтроллер (скорее всего STM32) и организация одновременного управления тремя (и более) двигателями.
При необходимости можно еще дополнительно вывести на МК выводы DECAY, MD и программно управлять режимом спада тока при различных условиях.
Список радиоэлементов
МикросхемаLB18471
Поиск в магазине ОтронВ блокнот
SBDx4
Диод4
Поиск в магазине ОтронВ блокнот
Конденсатор470 пФ2
Поиск в магазине ОтронВ блокнот
Конденсатор10 мкФ1
Поиск в магазине ОтронВ блокнот
Конденсатор47 мкФ1
Поиск в магазине ОтронВ блокнот
Резистор0.51 Ом2
Поиск в магазине ОтронВ блокнот
Резистор15 кОм2
Поиск в магазине ОтронВ блокнот
Lx2
Катушка индуктивности2
Обмотки шагового двигателяПоиск в магазине ОтронВ блокнот
Батарея питания1.5 В1
Поиск в магазине ОтронВ блокнот
Батарея питания5 В1
Поиск в магазине ОтронВ блокнот
Батарея питания42 В1
Поиск в магазине ОтронВ блокнот
Микросхема74271
К155ЛЕ4Поиск в магазине ОтронВ блокнот
Электролитический конденсатор10 мкФ1
Поиск в магазине ОтронВ блокнот
Переменный резистор5 кОм1
Поиск в магазине ОтронВ блокнот
Блок питания+5 В +12 В1
Поиск в магазине ОтронВ блокнот
Теги
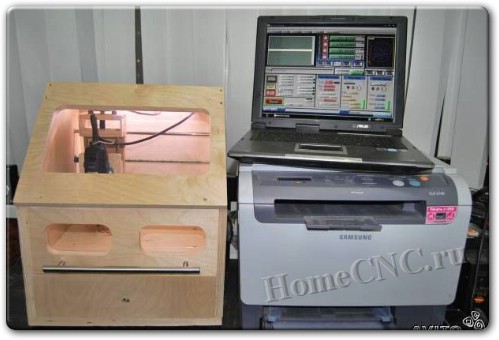
Подробное изготовление ЧПУ из принтера, который сделать легко и недорого. Такой агрегат сможет выполнять различные функции. Об этом в нашем материале.
Здравствуйте, дорогие друзья! Сегодня мы расскажем Вам про то, как создать ЧПУ из принтера. Основной причиной того, что сейчас так часто в интернете предлагают переделать из принтера или сканеров самодельные устройства, является то, что многие современные периферийные устройства для ПК настолько сложны с функциональной точки зрения, что в переделанном виде позволяют создавать станки, способные выполнять удивительные задачи.
Приступаем к изготовлению
Чтобы начать изготавливать станок ЧПУ из старого принтера, вам потребуются некоторые запчасти, которые входят в струйные принтеры:
Полученные станки с числовым программным управлением смогут выполнять различные функции. Всё, в конечном итоге, зависит от устройства, которое будет располагаться на выходе станке. Чаще всего из струйных принтеров делают фрезерный станок с ЧПУ, выжигатель (при помощи установки выжигателя на выходе устройства) и сверлильные машины для создания печатных плат.
Основой является деревянный ящик из ДСП. Иногда используют готовые, но не составит труда сделать го самостоятельно. Необходимо учесть, что внутри ящика будут располагаться электронные компоненты, контроллеры. Собирать всю конструкцию лучше всего при помощи саморезов. Не забывайте, что детали нужно располагать друг относительно друга под углом 90 градусов и крепить максимально прочно друг к другу.
Создание самодельного станка
Прежде, чем переделать принтеры или сканеры в мини станки, которые смогут выполнять фрезерные работы, следует максимально точно собрать раму конструкции и ее основные составляющие.

На верхнюю крышку устройства требуется установить главные оси, которые являются важными компонентами среди всех профессиональных станков. Осей должно быть всего три, начало работы необходимо производить с крепления оси у. Для того чтобы создать направляющую используют мебельный полоз.
Отдельно отметим создание ЧПУ из сканера. Переделка этого устройства такая же, как и, если бы, под рукой был старый струйный принтер. В любом сканере, есть шаговые двигатели и шпильки, благодаря, которым и производится процесс сканирования. В станке нам пригодятся эти двигатели и шпильки, вместо сканирования и печати будет производится фрезерование, а вместо головки, которая перемещается в принтере, будет использоваться движение фрезерного устройства.
Для вертикальной оси, в самодельном ЧПУ нам пригодятся детали из дисковода (направляющая по которой перемещался лазер).
В принтерах есть так называемые штоки, именно они играют роль ходовых винтов.
Вал мотора должен быть соединен со шпилькой при помощи муфты гибкого типа. Все оси необходимо прикреплять к основаниям, выполненным из ДСП. В конструкциях такого типа фрезер перемещается исключительно в вертикальной плоскости, при этом сдвиг самой детали происходит по горизонтали.
Электронные компоненты будущих станков
Это является одним из самых важных этапов конструирования. Электроника самодельных машин является ключевым элементом управления всеми двигателями и самим процессом.
Работы, которые будут выполняться будущим станком и процессы, возникающие во фрезерном и сверлильном механизмах – очень разнообразны и точны, поэтому нам понадобиться надежный контроллер и драйвер.
Самодельная машина может функционировать на отечественных К155ТМ7, их нам понадобиться 3 штуки.

К каждому драйверу идут проводки от своей микросхемы (контроллеры независимы).
Шаговые двигатели в самодельном аппарате должны быть рассчитаны на напряжение, не превышающее 30-35 В. Часто случалось так, что при повышенной мощности, советские микросхемы-контроллеры перегорали.
Блок питания идеально подходит от сканера. Его нужно подсоединить к блоку к кнопке включения, контроллером и сами устройством (фрезер, дрель, выжигатель и так далее).

Главная плата управления (материнская плата для станка ЧПУ своими руками) должна быть подключена к персональному компьютеру или ноутбуку. Именно при помощи компьютера станок сможет получать четкие задания и превращать их в трехосевые движения, создавая конечные продукты. Идеальным будет программа Math3, которая позволяет создавать эскизы. Также отлично подойдут профессиональные программы для векторной графики.
Конечно, все зависит от вашей фантазии и прочности (грузоподъемности) корпуса и рамы. Однако, чаще всего ваш аппарат сможет разрезать фанеру толщиной менее 1,5 см, трехмиллиметровый текстолит или пластик.
Сегодня разговор пойдет про изготовление самодельных ЧПУ станков из старых принтеров в которых используются шаговые двигатели.
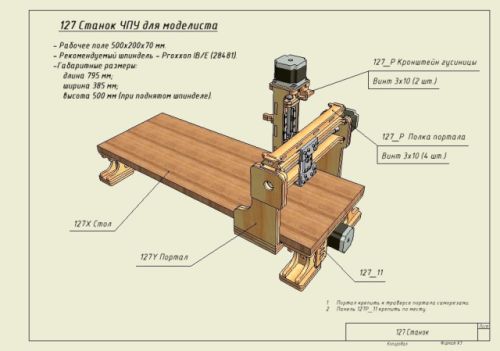
Характеристики ЧПУ станка собранного своими руками.
Рабочее поле: 160х240х70 мм.Резка : фанера до 15 мм, стеклотекстолит до 3 мм, пластики, дерево и так далее.Гравировка: включая цветные металлы. Скорость обработки: 2 мм/сек.
Как видите — не смотря на скромные размеры и использование маломощных шаговых двигателей самодельный ЧПУ станок вполне работоспособен не только для модельных дел, но для вполне серьезной работы.
Прежде чем описывать изготовление ЧПУ станка своими руками поговорим о донорах — матричных и струйных принтерах. Лучше всего подходят мартичники, особенно Epson, впрочем — Epson stylus color тоже не плох. Хороший донор и Ricoh, так же могут подойти Canon, Xerox, HP и другие.
В основе конструкции самодельного ЧПУ станка лежат 4 фанерных квадрата, дно и боковины 37х37 см, задняя стенка станка 34х37, передняя 9х34. Толщина листа фанеры 15 мм.
Соединяется коробка станка с помощью саморезов 3х40, для соединения засверливаем отверстия 2.5 мм сверлом в 7 мм от края.
В качестве направляющих по оси Y используются дюралевые уголки. Для крепления уголка на боковых стенках выбирается паз глубиной 2 мм в 3-х см от дна. Паз позволит легко прикрутить уголок без перекосов. Фиксация уголков выполняется с помощью саморезов через центральную грань.

Уголки используются по 20 мм. Длина — 34 см. Дюралевого уголка хватает на 300 часов работы станка, потом их можно сменить.
Для рабочего стола используются уголки длиной 14 см. На них крепятся 3 подшипника 608ZZ — 2 сверху и 1 снизу. Крепление осуществляется с помощью болтов М8х25. Здесь нужно соблюсти соосность — рабочий стол должен двигаться по направляющим легко и без усилий.
На высоте 5 см от дна ЧПУ станка сверлится отверстие диаметром 22 мм для мотора оси Y, в передней стенке отверстие делается глубиной 7 мм под опорный подшипник ходового винта.
Моторы используются от принтеров, берите те принтеры, в которых стоят шаговые двигатели, на фотографиях ниже их примеры.


Ходовой винт — обычная строительная шпилька М8. Соединение двигателя со шпилькой через самодельную муфту, смотрите их примеры в статье Как сделать самодельную муфту для ЧПУ станка. В качестве резиновой трубки используется старый советский шланг от душа, внутри у него именно резина, а не пластик, как у современных.

Ходовая гайка — обычная удлиненная гайка М8, в ней просверлены отверстия диаметром 2.5 мм и нарезана резьба М3 — для крепления гайки к оси.
Теперь об оси Z.
Наверное это самое сложное место в изготовлении самодельного ЧПУ станка подобного типа. Для основания используется фанера толщиной 6 мм.
Направляющие — стандартные от принтеров, их диаметр 8 мм.

Деревянные детали склеиваются между собой клеем «ПВА Столяр», в них вклеиваются на эпоксидку линейные подшипники. Можно вставить бронзовые втулки от кареток, но, лучше не мелочиться.

Ходовая гайка — та же самая, удлиненная с отверстием под винт, ее тоже можно прихватить на эпоксидный клей.
Так, как в качестве шпинделя будет использоваться дремель, то держатель для него легко изготовить из кронштейна для досок шириной 80 см. Купить такой кронштейн можо в магазине строительных товаров.
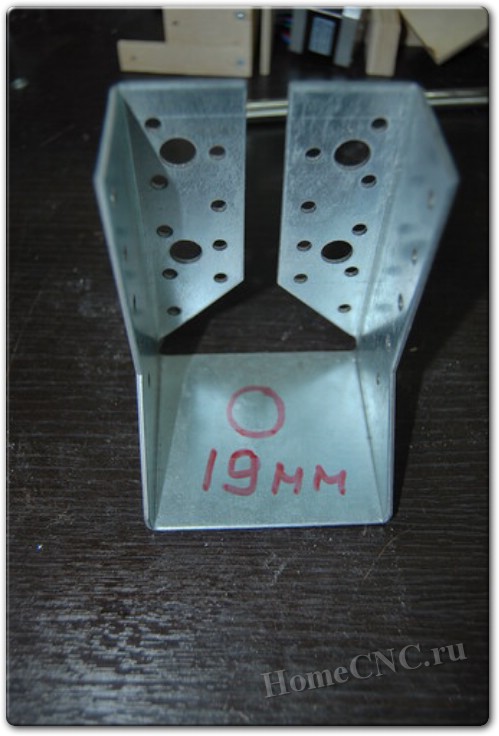
В нижней части сверлится отверстие диаметром 19 мм — под вывод дремеля.

Кронштейн закрепляется с помощью саморезов на основании оси Z, не забудьте просверлить отверстия перед вворачиванием саморезов!

База каретки Z выпиливается из фанеры толщиной 15 мм и имеет следующие размеры:
Размеры основания 150х90 мм
Верх и низ 90х50 мм
В средней части верхней заготовки сверлится отверстие глубиной 7 мм для опорного подшипника 608ZZ. Все это можно увидеть на фотографии выше.
Для установки направляющих сверлятся отверстия и конструкция собирается следующим образом.

Пластинка сверху — это держатель шагового двигателя, как и на оси X и Y — можно применить двигатель от принтера.

Теперь остается только собрать ось Z вместе с держателем дремеля и установить в самодельный ЧПУ станок.
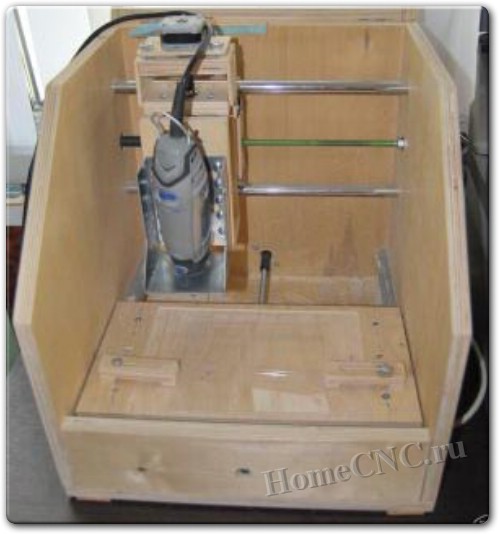
Вот так выглядит механика собранного своими руками ЧПУ станка.
Электроника самодельного ЧПУ станка
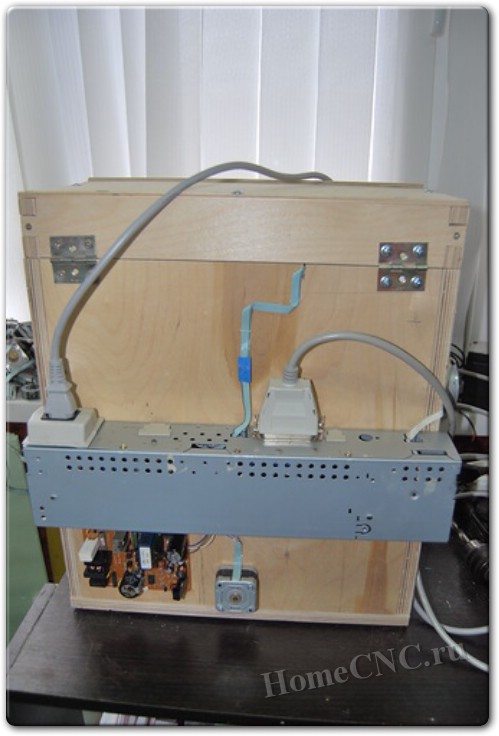
Одним из вариантов является изготовление самодельной платы управления ЧПУ станком на микросхемах из плат принтеров — LB1745 + 12F675 или на StepStikaх. Но, это доступно тем, у кого скил паяльника хорошо прокачен. На фотографии выше — как раз самодельная электроника и блок питания от одного из принтеров участвующих в качестве донора.
Однако, можно не греть паяльник, а использовать готовую плату контроллера ЧПУ станка.

Это 5-ти осевой контроллер для ЧПУ станка — читайте о нем статью тут. Там же и ссылка на покупку.
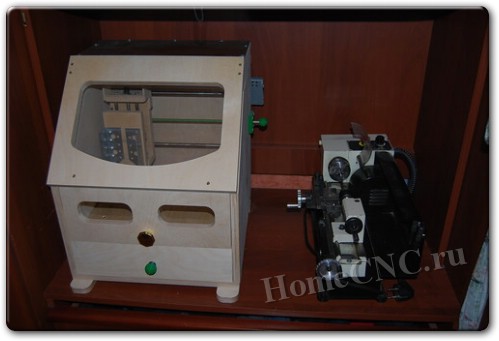
Вот собственно и все — самодельный ЧПУ станок готов к работе.
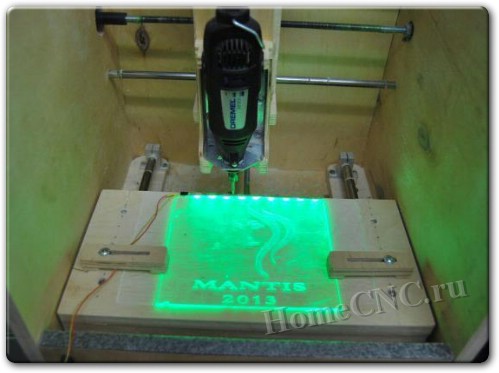
А это — примеры изготовленных поделок на таком ЧПУ станке. Кстати, с помощью собранного своими руками ЧПУ станка можно собирать и другие станочки, по крайней мере — вырезать все детали для оси Z.

Станок можно использовать без крышки.

В таком варианте он собирается гораздо быстрее, но, пыль от обработки материала разлетается по всему помещению.

По этой технологии было собрано более 30 станков, которые затем продавались на Авито. Автор разработки — А.Лошак. Сейчас он прекратил изготавливать ЧПУ станки на продажу и переключился на сборку 3D принтеров.
Стоит добавить — во время изготовления в ход шло то, что есть под рукой, вот пример без использования уголков, только направляющие от принтеров.
Так же интересно:

— Чертежи и видео сборки самодельного ЧПУ станка из МДФ или фанеры.